


























协作机器人关节电机产品技术参数
2022-1-6 04:37
协作机器人关节电机是一种运用在机器人手臂关节、手指关节上的驱动电机,主要驱动结构由驱动电机(马达)、减速器(齿轮箱、行星齿轮箱)集成组装而成的减速驱动设备,具有减速、驱动、提升扭矩功能;运用在不同领域,不同型号、功率的协作机器人,关节电机的技术参数,性能特点也不一样;通常采用定制关节电机产品技术参数服务,例如齿轮箱驱动系统类型、输出功率、减速比、输出扭矩、驱动精度、噪音、齿轮材质等技术参数是定制开发而成;中国AG旗舰机电股份有限公司,提供齿轮箱驱动系统开发、设计服务,提供协作机器人关节电机定制、制造服务。
定制案例:
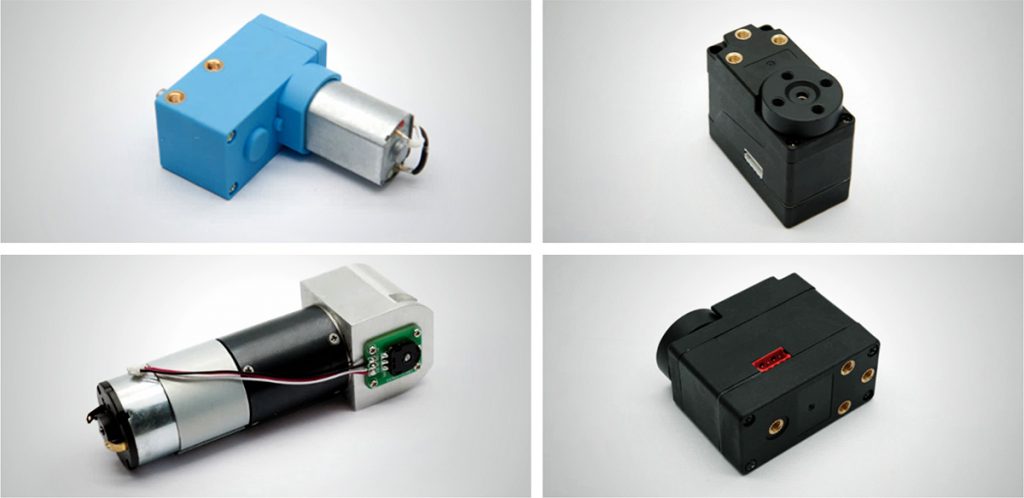
项目名称:机器人关节电机
项目名称:在沟通快速响应交互中,直流减速电机用于驱动机器人的关节,要求有较大功率质量比和扭矩惯量比、高启动转矩、地惯量和较宽广且平滑的调速范围。
解决方案:机器人关节行星齿轮箱的关节齿轮拥有二级、三级、四级驱动变化可根据机器人电机的设计需求更换减速比及调整齿轮箱的输入转速及力矩。
取得成果:解决了驱动效率和降噪需求;在进行机器人关节齿轮模具设计时,优化齿轮变位系数和行星齿轮齿干涉校验,预防和改善关节电机的效率、噪音等问题,让机器人关节运动更加灵活。

相关产品/ RELATED



在线留言 MESSAGES






