微型智能机器人电机产品技术参数与定制开发
智能机器人具备形形色色的内部信息传感器和外部信息传感器,如视觉、听觉、触觉、嗅觉。除具有感受器外,它还有效应器,作为作用于周围环境的手段。这就是筋肉,或称自整步电动机,它们使手、脚、长鼻子、触角等动起来。由此也可知,智能机器人至少要具备三个要素:感觉要素,反应要素和思考要素。微型智能机器人电机是一种运用在智能机器人驱动上的驱动齿轮系统上,是一种小功率微型齿轮箱电机,主要驱动结构由驱动电机(驱动马达)、齿轮箱(减速器)集成制造组装而成的减速设备;驱动电机可以采用直流有刷电机、直流无刷电机、步进电机、空心杯电机作为驱动源,齿轮箱可采用行星齿轮箱、圆柱齿轮箱、蜗轮蜗杆齿轮箱作为减速器;运用在不同类型的微型智能机器人的齿轮箱电机也不一样,通常采用定制技术开发而成,例如输出功率,输出转速,减速比,输出扭矩,噪音噪音,驱动精度,齿轮箱驱动结构类型等技术参数是定制开发而成;中国AG旗舰机电机电股份有限公司提供一整套定制开发解决方案服务,微型智能机器人电机齿轮箱定制技术参数范围在,直径规格在3.4mm-38mm之间,电压在24V以下,输出功率在50W以下,输出转速5rpm到1500rpm之间,速比范围2-2000之间,输出力矩1gf.cm到50Kgf.cm之间微型驱动齿轮箱减速系统。
定制开发方案:
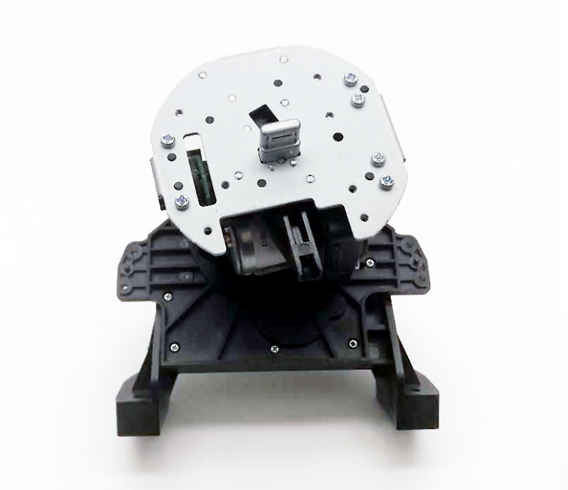
项目名称:智能机器人轮式行走齿轮箱解决方案
项目背景:智能机器人可以按预先编排的程序或人工智能技术制定的原则纲领行动,成熟智能的产品可以取代人的工作,例如生产业、建筑业,或是危险的工作。机器人按运动方式分为轮式、腿式、履带式、蛇形式和复合式等方式。其中轮式移动机器人在自主移动机器人领域占有较为重要的地位,具有运动速度快、控制简单等特点,在自动码垛生产线、无人驾驶车辆 等领域应用广泛。
技术难题:一是轮式移动机器人的拐弯躲避障碍物能力差,二是轮式移动机器人的爬坡能力差,这也是限制轮式移动机器人应用的原因。
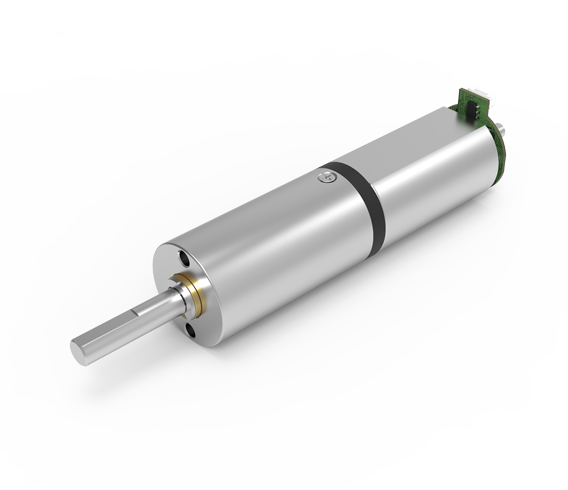
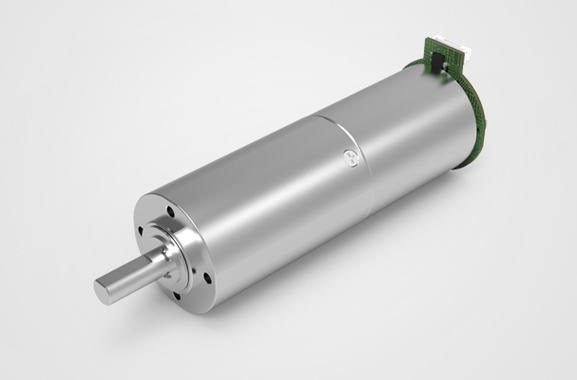
解决方案:机器人轮式行走驱动部分采用直流电机和38mm行星齿轮箱组合,反对称安装方式。这种方式可以在使轮对同轴,提供较大动力(通常电机外形尺寸和功率成一定比例)的情况下,减轻减速机输出轴受力点,大大缩短轮距,节约空间,以使机器人体积小型化。