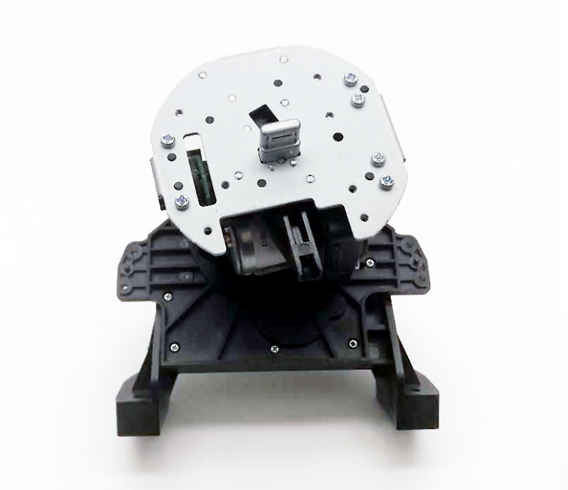
履带机器人驱动电机参数
履带机器机器人结构对称分布,车体两侧安装履带及腿移动机构,电机、驱动机构、减速装置安装在车体内部。履带本体外装有缓冲筋条,可以减缓履带行走过程中的冲击,提高履带行走的平稳性,并可延长履带的使用寿命。履带腿机构可以绕转轴旋转,根据不同的地形形成不同的机器人构型,以更好的适应复杂的地形环境。当在机器人在较为平坦的地面行驶时,履带腿机构与本体重合,可以减小机器人行走过程中的阻力;履带移动机器人具有牵引力大、不易打滑、越野性能好等优点,可以搭载摄像头、探测器等设备代替人类从事一些野外探险、科研工作。履带机器人驱动电机是一种小功率微型驱动电机,输出功率在50W以下,电压在24V以内,具备驱动,减速功能,主要驱动结构由驱动电机、齿轮箱组装而成,驱动电机可采用直流无刷电机、直流有刷电机、步进电机、空心杯电机等微型电动机作为驱动源,减速齿轮箱可采用行星齿轮箱、圆柱齿轮箱、平行齿轮箱、蜗轮蜗杆齿轮箱等定制开发齿轮箱;通常采用定制参数,例如电机类型,直径规格,电压,电流,功率,齿轮箱结构,减速比,扭矩,输出转速等参数是按需定制;中国AG旗舰公司致力于研发、设计、制造智能机器人驱动电机齿轮箱产品,可按照需求定制产品参数。
履带机器人驱动电机参数:
材质系列:塑胶行星齿轮箱、金属行星齿轮箱
直径规格:3.4mm-45mm
输出力矩范围:1gf-cm至50kg-cm;
减速比范围:5-1500;
输出转速范围:5-2000rpm;

定制机器人开发案例:
产品名称:机器人关节齿轮箱
产品分类:智能机器人驱动齿轮箱
电 压:3V-24V
工作温度:-30……+100℃
直径规格:3.4MM到45MM
噪音:稳定后低于42db(250px距离)
项目说明:为适应现代高科技研制的各种类型的机器人关节需求,我们生产的机器人关节齿轮箱产品规格有3.4MM到45MM不等;为解决舵机齿轮的设计及制造精度、舵机的回程差的控制,根据公司多年的研发设计经验结合机器人关节的市场需求优化了舵机齿轮的设计及制作精度,降低回程差。